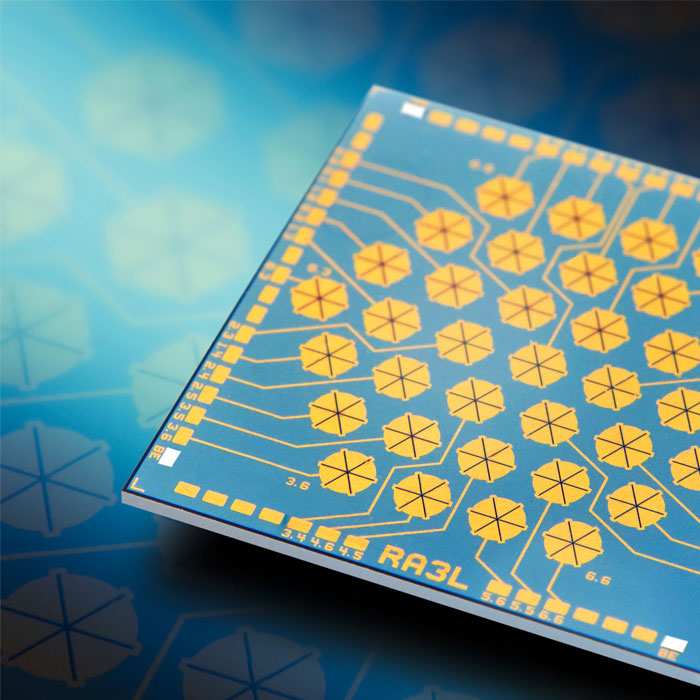
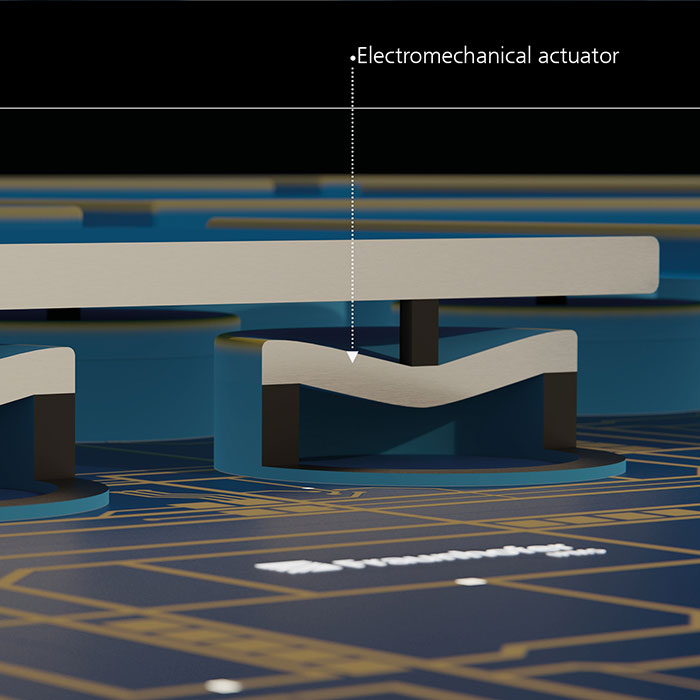
Mikropositionierplattformen sind Systeme, bei denen eine definierte, meist zentral angeordnete Fläche Lateral-, Dreh-, Kipp- oder Hubbewegungen sowie Kombinationen dieser ausführen kann. Der Antrieb gelingt über Mikroaktoren mit der Plattform verbunden sind. Die Mikroaktorik kann insbesondere durch Biegewandler bewerkstelligt werden.
Am Fraunhofer IPMS werden elektrostatische Biegewandler entwickelt. Sie kommen in den Mikropositionierplattformen als Direktantrieb zum Einsatz. Ein alternativer indirekter Antrieb erfolgt in Form eines „Inchworm“- Prinzipes. Dieses beschreibt die schrittweise Verschiebung eines Vorschubelementes abwechselnd mit einer Klemmung. Das Vorschubelement selbst kann mit einer Plattform verbunden sein. Die Vorschubaktorik wird durch die Biegewandler gebildet. Hingegen kann die Klemmfunktion elektrostatisch oder durch weitere Biegewandler erfolgen. Mit einem solchen MEMS-Inchworm-Motor sind präzise und in Summe große Stellwege möglich.
Mikroaktoren und Mikropositionierplattformen gehören zur Disziplin der Mikro- und Nanosysteme. Forschungsschwerpunkte liegen im Bereich der Dynamik, Dämpfung, Zuverlässigkeit, Tribologie, Elektrostatik, Ansteuerung sowie Aufbau- und Verbindungstechnik. Anwendungen der Mikropositionierplattformen im weiteren Sinne finden sich beispielsweise in der Analytik zur Probenplatzierung und Mikromanipulation oder auch in der optischen Analytik für besonders flach bauende und mobile Mikroskopiersysteme.
 Fraunhofer-Institut für Photonische Mikrosysteme
Fraunhofer-Institut für Photonische Mikrosysteme